
| Moonbuggy - Technical documentation |

Over the last years the telemetry/electronics Award was introduced because of Ralf Heckels suggestion. This award is being promoted, encouraged and supported by the AIAA (American Institute for Aeronautics & Astronautics). The first winner of this 500$ prize was the Moonbuggy Team Russia of the ISEI. During the years 2008-2012, the data was collected with components made by HinzTec. It was sent via CB radio every second to a receiver (laptop with evaluation software). This basic principle has constantly been improved and especially made more robust.
With the analyzed data the overall Moon-Buggy design had become far more understandable and therefore enabled further improvements. A direct result of this is the construction of the Moonbuggy differential gear. The goal is now to use the advantage of our team in this technology and further expand the telemetry. Additional sensors and the use of microcontrollers are already planned.
The NASA requirements
demand that either one of these two options is fulfilled:
1. Transmission of a real-time video
2. Transmission of real-time sensor data
Also an on-board-logging-system can be used in order to save the transmitted data additionally in higher quality right inside the buggy. Extra credit will be given for recording the boardcam-video as well. The final score will consist of 50% written presentation and of 50% performance during the race.
We decided to transmit real-time sensor data such as GPS, 3D-acceleration and speed. The method of transmission we use is called APRS (Automatic Packet/Position Reporting System), which is a special form of packet radio. The transmission of the digital signals is done using AFSK (Audio Frequency Shift Keying). In course of this the binary information 0 and 1 are transmitted as sounds with 1200 Hz and 2200 Hz. The sounds are switched with a baud rate of 1200 Hz. The data is received using a hand radio device, which is connected to the Mission Control Laptop. The information is analyzed using UI-View program.

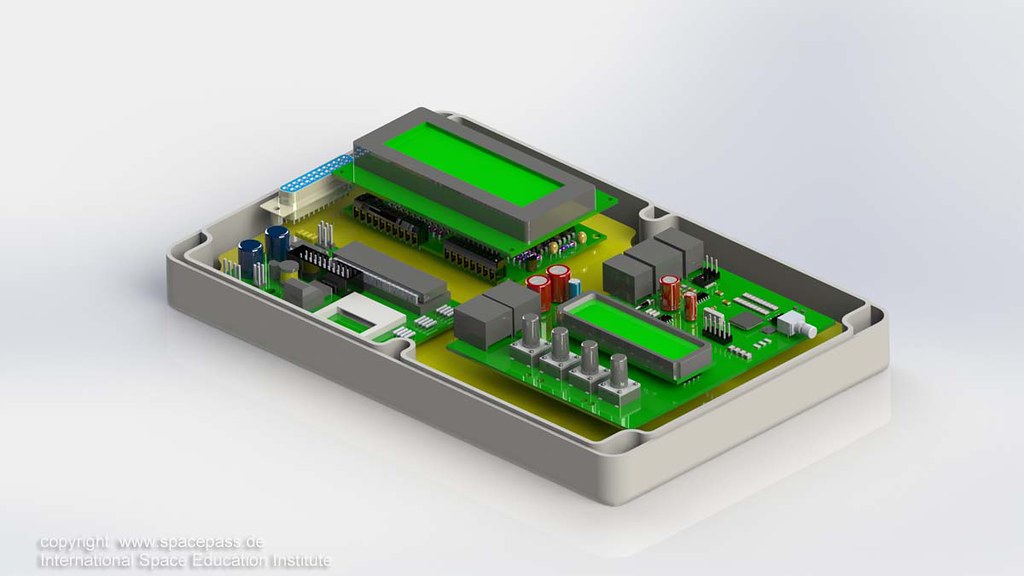
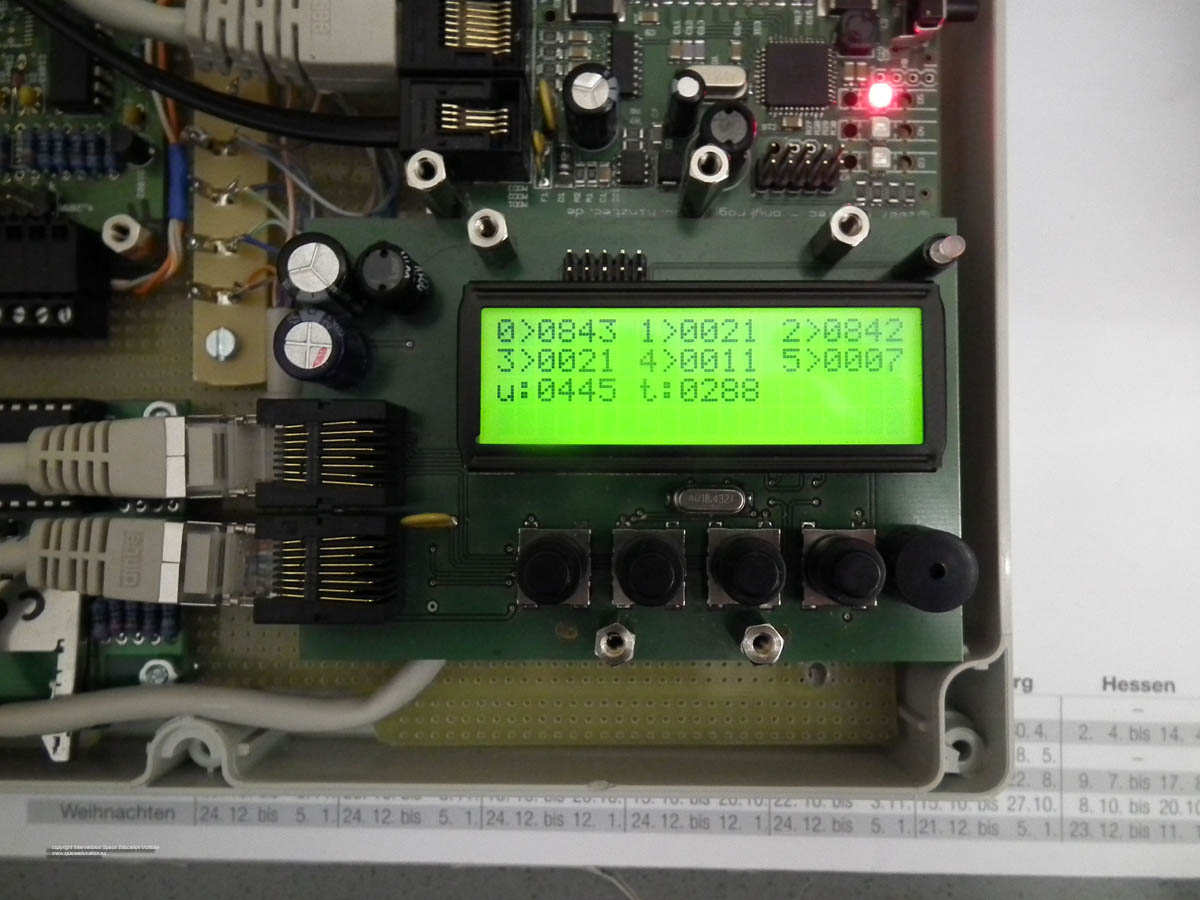
 The telemetry consists of several parts. Attached to the back seat of the buggy is the high-gain antenna as well as the GPS-sensor. There are two boxes beneath the seat. Inside the main telemetry box are SMD (short message display) and anyfrog, which together are responsible for processing and transporting the sensor data. Consequently the GPS-sensor and the speed sensor are connected to the box. The acceleration sensor is connected directly to the SMD and therefore in the main telemetry box, too. There is also the on-board-logging-system in the box. To record the data we use an Arduino MEGA. After the race we can further analyze the recorded data with suitable software. The goal is to play the recorded sensor data and the boardcam-video at the same time in order to ensure a good analysis. The power supply is a rechargeable 12V lithium-ion battery. In the second box is the transmitter. It is connected to the anyfrog (main telemetry box) as well as the high gain antenna. Besides the transmitter is yet another power supply which provides the 12V for the transmitter.
The telemetry consists of several parts. Attached to the back seat of the buggy is the high-gain antenna as well as the GPS-sensor. There are two boxes beneath the seat. Inside the main telemetry box are SMD (short message display) and anyfrog, which together are responsible for processing and transporting the sensor data. Consequently the GPS-sensor and the speed sensor are connected to the box. The acceleration sensor is connected directly to the SMD and therefore in the main telemetry box, too. There is also the on-board-logging-system in the box. To record the data we use an Arduino MEGA. After the race we can further analyze the recorded data with suitable software. The goal is to play the recorded sensor data and the boardcam-video at the same time in order to ensure a good analysis. The power supply is a rechargeable 12V lithium-ion battery. In the second box is the transmitter. It is connected to the anyfrog (main telemetry box) as well as the high gain antenna. Besides the transmitter is yet another power supply which provides the 12V for the transmitter.
photogalery of past activities, movie for explaining of the telemetry 2009
| < Prev |
|---|