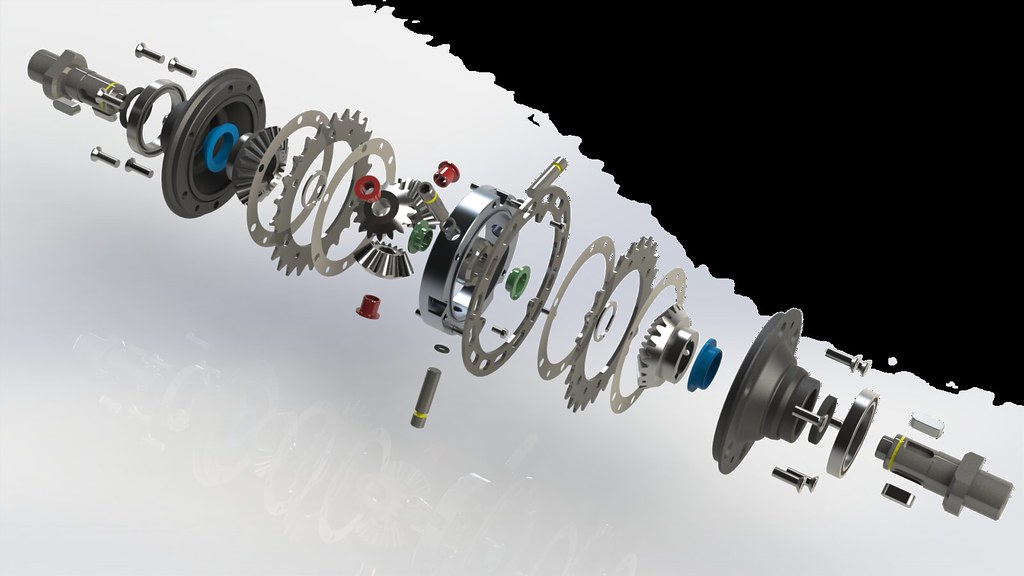
Heute wurde das neue Differentialgetriebe der Moonbuggys auf der intec-Zuliefermesse in Leipzig vorgestellt. Die deutschen Maschinenbau-Unternehmen Mädler und IGUS hatten die 5-jährige Entwicklung dieses Getriebes mit Material begleitet. Die Entwicklung wurde von einem internationalen Schülerteam (14-18 Jahre) unter Leitung eines Jungingenieurs aus Moskau (22) und der Federführung des Vereins "International Space Education Institute" in Leipzig durchgeführt. An der Herstellung und Bearbeitung der Einzelteile nach den CAD-Vorlagen des Entwicklerteams beteiligten sich die sächsischen Unternehmen: Dreherei Günter Jakob, Wittenbecher Maschinenbau, Aischmann Maschinenbau, Holl GmbH, 1st Mould. Die Entwicklung wurde vom Verein in Eigenleistung mit Unterstützung der Fa. Bruno Banani und dem Space Hotel Leipzig finanziert.
Die 5- Jährige Entwicklung basierte hauptsächlich auf den hohen Anforderungen während des jährlichen Einsatzes auf dem NASA-Moonbuggy Race. Es wurden 16 Hochbelastungs-Rennen gefahren und zahlreiche Daten mit einer Sensoren- und Datentelemetrie aufgezeichnet. Durch die Datenerhebungen konnte das Getriebe in drei Generationen signifikant optimiert werden. Es entstand damit ein wissenschaftlicher Kreislauf zwischen Entwicklung - Testergebnissen - Auswertung und Weiterentwicklung. Während dieser Zeit absolvierten zwei Teammitglieder mit diesem Thema ihr Propädeutikum im Abitur mit Bestnote.
Auf der INTEC-Zuliefermesse in Leipzig stellten heute der Chefdesigner Evgeniy Zakutin (ISEI) und die Produzenten Ronny Hessel (Dreherei Günter Jakob) sowie Siegfried Aischmann (Aischmann Maschinenbau) das neue Moonbuggy Getriebe vor. An den Ständen von Mädler und IGUS traf das frisch montierte Herzstück vieler bislang erreichter NASA-Wettbewerbserfolge auf Anerkennung. Es wurde dem Standleiter der Fa IGUS, Herrn Dipl. Ing. Thomas Sommerweiß, übergeben. Dieses Getriebe ist Teil des 6. manus®-Wettbewerbes für Kunststoff-Gleitlager-Anwendungen der Fa. IGUS und wird am 10. April 2013 auf der Hannovermesse präsentiert.
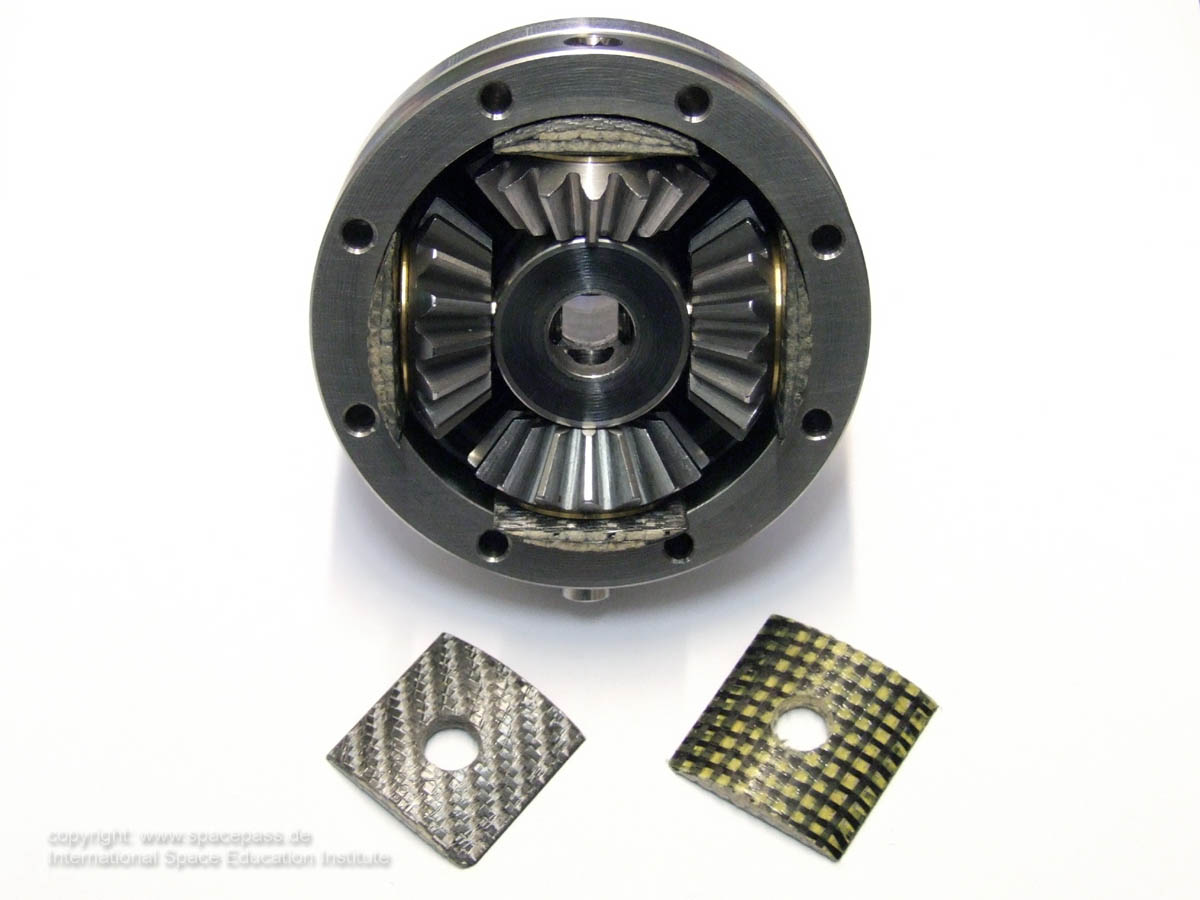
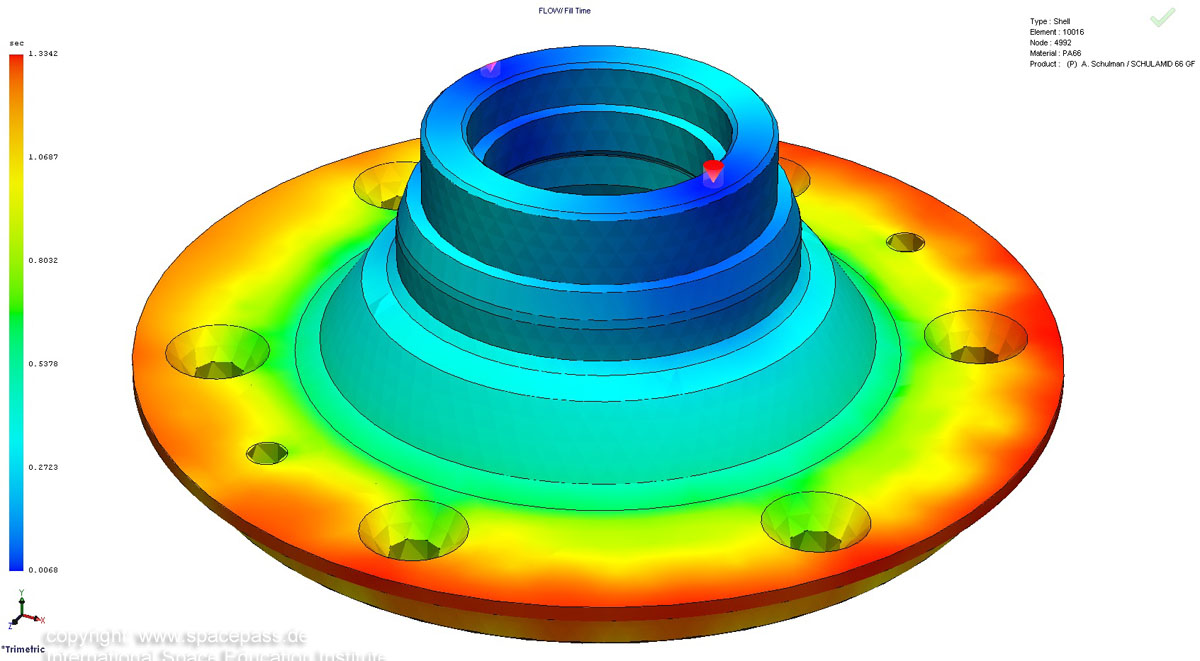
Die Besonderheiten des robusten und leichten Getriebes sind u.a. die Verwendung wartungsfreier Polymer-Gleitlager, der Einsatz von carbonfaserverstärktem Kunststoff im Spritzgussverfahren und natürlich das junge Durchschnittsalter der Entwickler - 17 Jahre. Das serienreife Getriebe findet nun vielseitige Einsatzmöglichkeiten nicht nur beim NASA Moonbuggy Race, einem Konstruktionswettbewerb für Hochleistungsteams. So ist es vor allem für leichte Elektromobile, E-Quads, Trikes, Ped-Mobile, Funsportmobile, Krankenfahrstühle und automatisch gesteuerte Industriemobile im Werksverkehr gedacht. Es ist einsatzfägig bis zu einem Drehmoment von 300 Nm.
Der lange und schwere Weg bis zu einem lupenreinen Produkt erfordert vor allem Teamwork, Integrität, Exzellenz, Ideen, Engagement und Geduld. Hier ein kommentierter Bilder-Auszug mit Großfotos aus der mühsamen Entwicklung in 5 Jahren. Alle Beteiligten sind damit über sich hinaus gewachsen:
Entwicklungsdokumentation mit Bewerbung für den manus®-Wettbewerb (PDF, 24 MB),
Fotodokumentation seit 2008 (Flickr-Archiv)
Das Konstrukteursteam:
Schüler (mit Eintrittsalter/Verweildauer in Jahren):
Thommy Knabe (15/7) Fabian Hoffmann (16/2) Anne Geyer (13/3)
Tobias Meier (14/3) Christoph Eibeck (15/1) Eric Meinel (15/2)
Max Frank (17/3) Nadin Rößler (16/3) Jasmin Haack (17/1)
Araceli Zeller (14/1)
Studenten und Jungingenieure:
Christian Hein (22/1), Deutschland, zeichnete den Entwurf der 1. Generation
Evgeniy Zakutin (22/4), Russland, zeichnete die Getriebe der 2. und 3. Generation
Gesamtleitung/Idee/Finanzierung/Korrektur:
Ralf Heckel - International Space Education Institute
Yvonne Heckel - International Space Education Institute
fördernde Unternehmer (Materialspenden & Leistung):
Ronny Hessel - Dreherei Günter Jakob
Herr Wittenbecher - Wittenbecher Maschinenbau
Siegfried Aischmann - Aischmann Maschinenbau GbR
Frau Rathmann - Holl GmbH
Dr. Schmidt - Bildungs- und Technologiezentrum der Handwerkskammer Leipzig
Kent Prelle - Singlespeedshop
sowie viele weitere Unternehmer und Gewerbetreibende, die das Moonbuggy-Projekt in Deutschland unterstützen
fördernde Industriebetriebe (Materialspenden & Leistung):
igus® GmbH, Mädler GmbH, 1ST MOULD GmbH,
fördernde Unternehmen (Geldspenden):
Bruno Banani, Space Hotel Leipzig, Dekra Leipzig
")
")
")

")
")